
Timer--PWM控制蜂鸣器
本篇详细的记录了如何使用STM32CubeMX配置STM32L431RCT6的通用定时器外设,产生PWM驱动无源蜂鸣器。
一. 准备工作
硬件准备
开发板:小熊派BearPi-IoT_Std开发板
蜂鸣器:
这里使用扩展板上的蜂鸣器,如图:

蜂鸣器的原理图如下:

软件准备
- 完成STM32 CubeMX 安装
- 参考BearPi-IoT_Std十分钟上手教程完成MDK开发环境搭建。
二.生成MDK工程
1.选择芯片型号
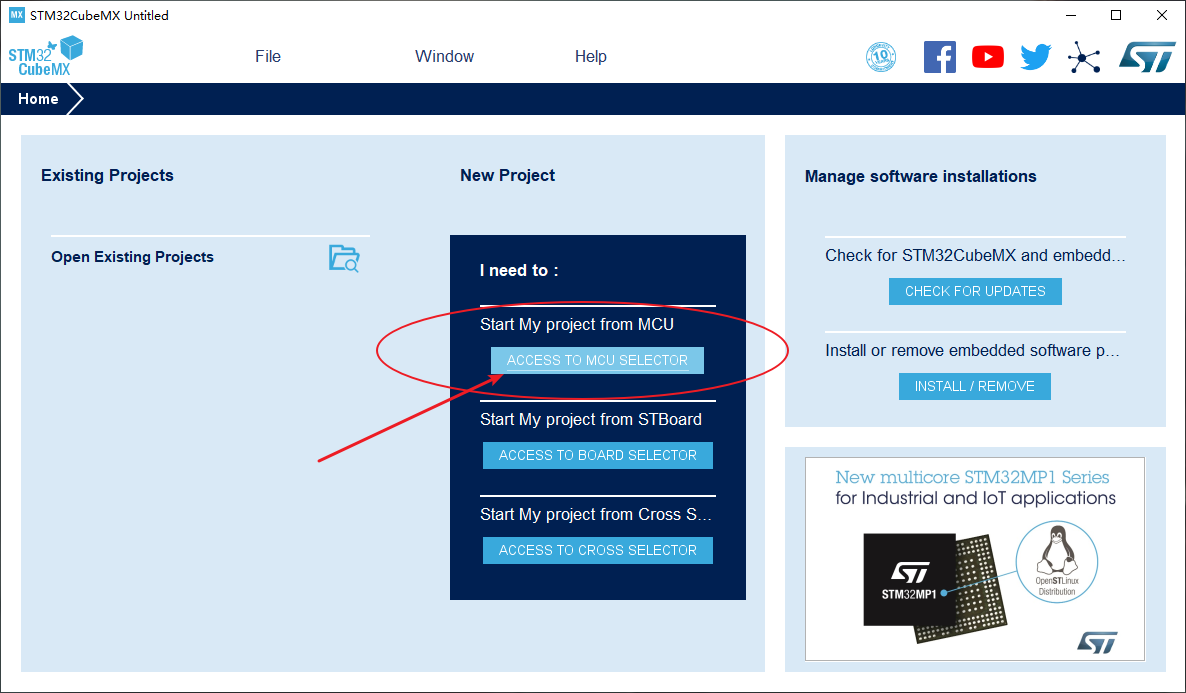
打开STM32CubeMX,打开MCU选择器:
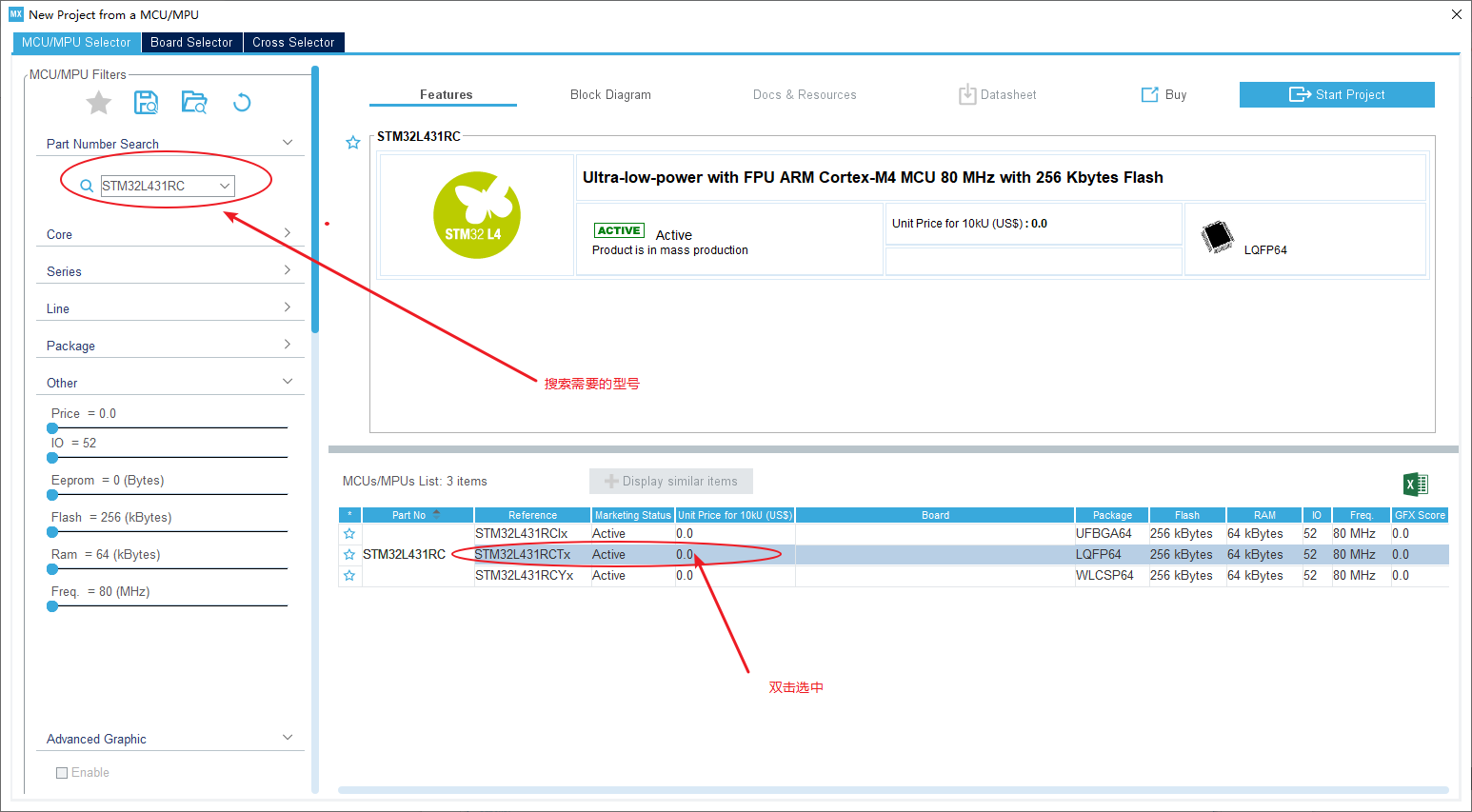
搜索并选中芯片STM32L431RCT6:
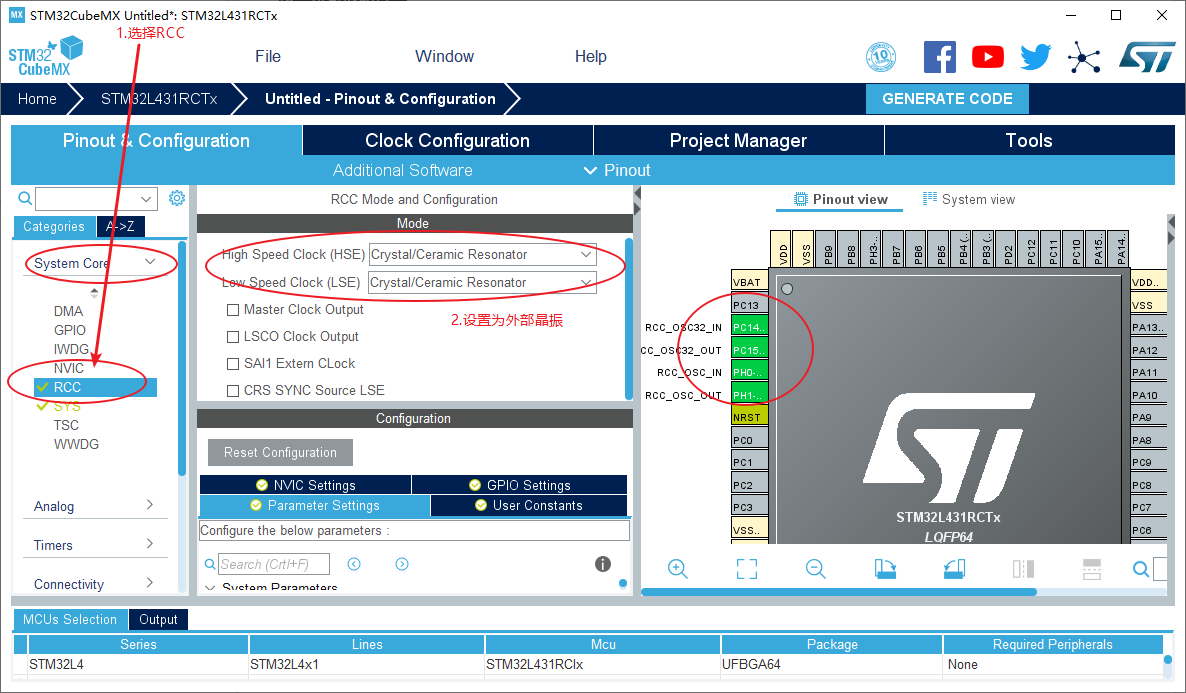
2.配置时钟源
- 如果选择使用外部高速时钟(HSE),则需要在System Core中配置RCC;
- 如果使用默认内部时钟(HSI),这一步可以略过;
这里使用外部时钟为例:
3.配置通用定时器TIM16
知识小卡片——STM32L431的定时器
STM32L431xx 系列有 1 个高级定时器(TIM1), 3 个通用定时器(TIM2、TIM15、TIM16),两个基本定时器(TIM6、TIM7),还有两个低功耗定时器(LPTIM1、LPTIM2)。
STM32L431 的通用 TIMx (TIM2、TIM15、TIM16)定时器功能包括:
16 位(TIM15,TIM16)/32 位(TIM2)向上、向下、向上/向下自动装载计数器,注意: TIM15、TIM16 只支持向上(递增)计数方式;
16 位可编程(可以实时修改)预分频器,计数器时钟频率的分频系数为 1~65535 之间的任 意数值。
4 个独立通道(TIMx_CH1~4, 其中 TIM15 最多 2 个通道, TIM16 最多 1 个 通道),这些通道可以用来作为:
- 输入捕获
- 输出比较
- PWM 生成(边缘或中间对齐模式)
- 单脉冲模式输出
可使用外部信号控制定时器和定时器互连的同步电路。
如下事件发生时产生中断/DMA:
- 更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发)
- 触发事件(计数器启动、停止、初始化或者由内部/外部触发计数)
- 输入捕获
- 输出比较
接下来开始配置TIM16定时器的PWM功能:
首先选择TIM,选择通道1的功能,默认的CH1是PA6引脚,但是开发板上是与 PB8 连接的,所以在右边将PB8配置为TIM16_CH1:

接下来是对TIM16的参数设置,参照数据手册中的RCC时钟树,TIM16内部时钟来源是PCLK2 = 80Mhz,我们的目的是产生1khz的PWM,所以预分频系数设置为80-1,自动重载值为1000-1,得到的计时器更新中断频率即为80000000/80/1000 = 1000 Hz = 1K Hz:

其余的一些设置保持默认即可,最后配置PWM占空比:

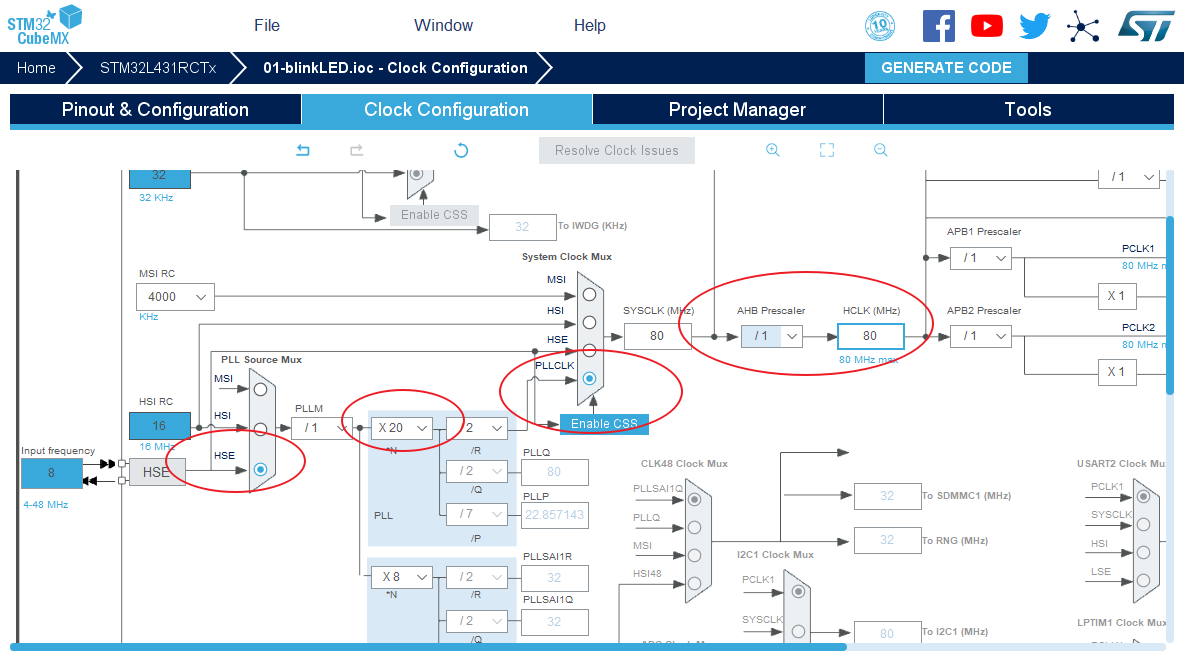
4.配置时钟树
STM32L4的最高主频到80M,所以配置PLL,最后使HCLK = 80Mhz即可:
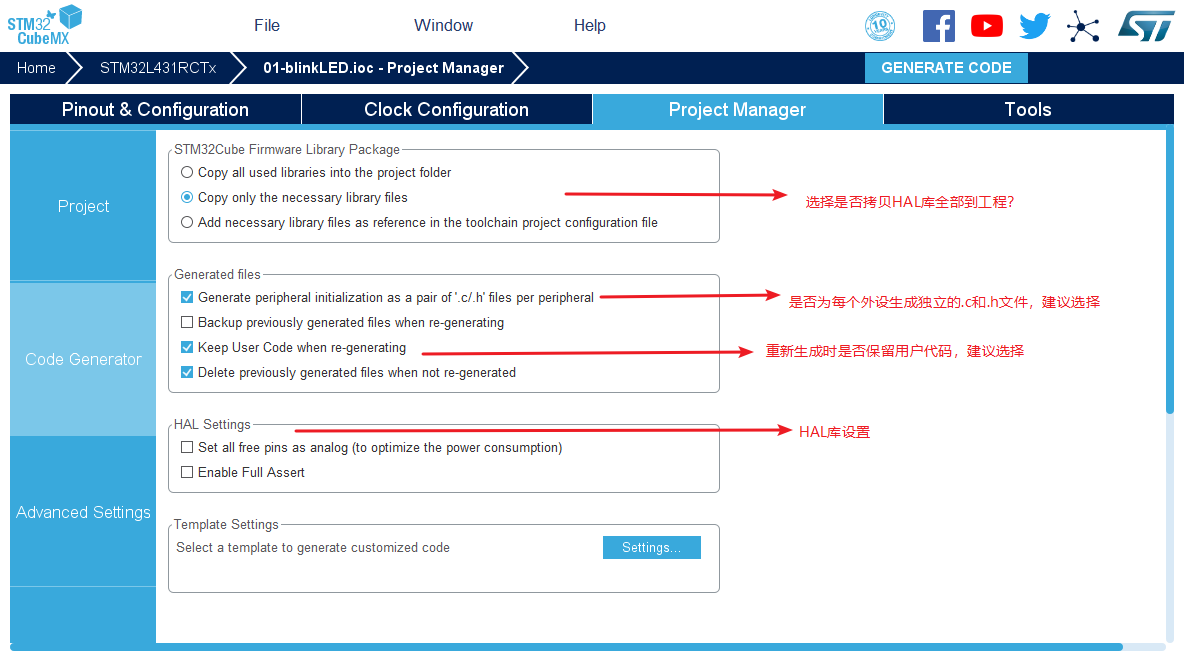
5.生成工程设置

6.代码生成设置
最后设置生成独立的初始化文件:
7.生成代码
点击GENERATE CODE即可生成MDK-V5工程:

三. 编译测试
1.编写用户代码
启动定时器并产生PWM
在main函数中开启TIM16并使能其中断(TIM16初始化代码之后):
while (1)
{
HAL_TIM_PWM_Start(&htim16,TIM_CHANNEL_1);
HAL_Delay(1000);
HAL_TIM_PWM_Stop(&htim16,TIM_CHANNEL_1);
HAL_Delay(1000);
}
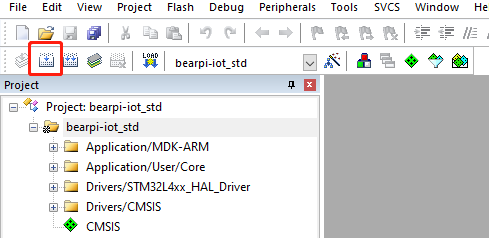
2.编译代码
选择project菜单,点击Build Project编译工程。
如果工具栏上有编译按钮快捷键,可以直接点击工具栏上的编译按钮:
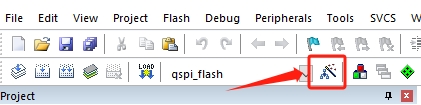
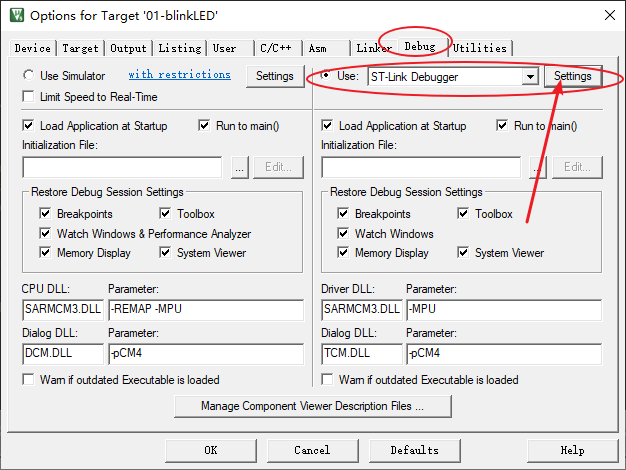
3.设置下载器
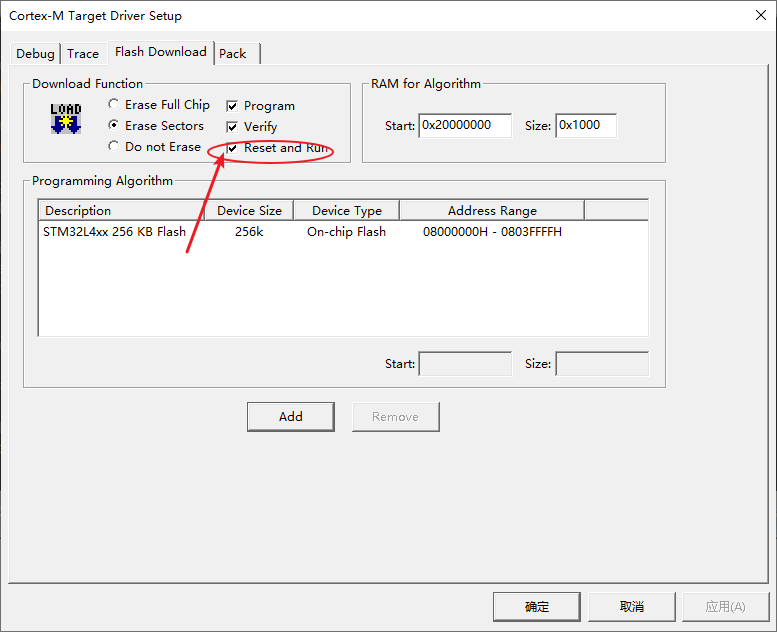
4.下载运行
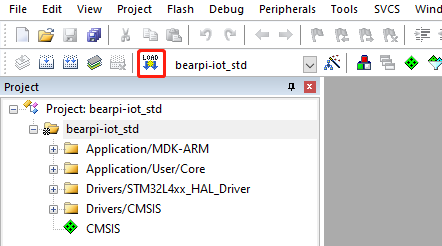
选择Flash菜单,点击Download下载程序到开发板上并运行。
如果工具栏上有下载按钮快捷键,可以直接点击工具栏上的下载按钮:
5.实验现象
下载运行后,可听到无源蜂鸣器开始工作。
至此,我们已经学会如何使用通用定时器产生PWM驱动蜂鸣器。

