
USART串口--中断模式
本篇文章主要介绍如何使用STM32CubeMX初始化STM32L431RCT6的USART,并使用中断模式发送和接收数据。
一. 准备工作
硬件准备
- 开发板:小熊派BearPi-IoT_Std开发板
软件准备
- 完成STM32 CubeMX 安装
- 参考BearPi-IoT_Std十分钟上手教程完成MDK开发环境搭建。
二.生成MDK工程
1.选择芯片型号
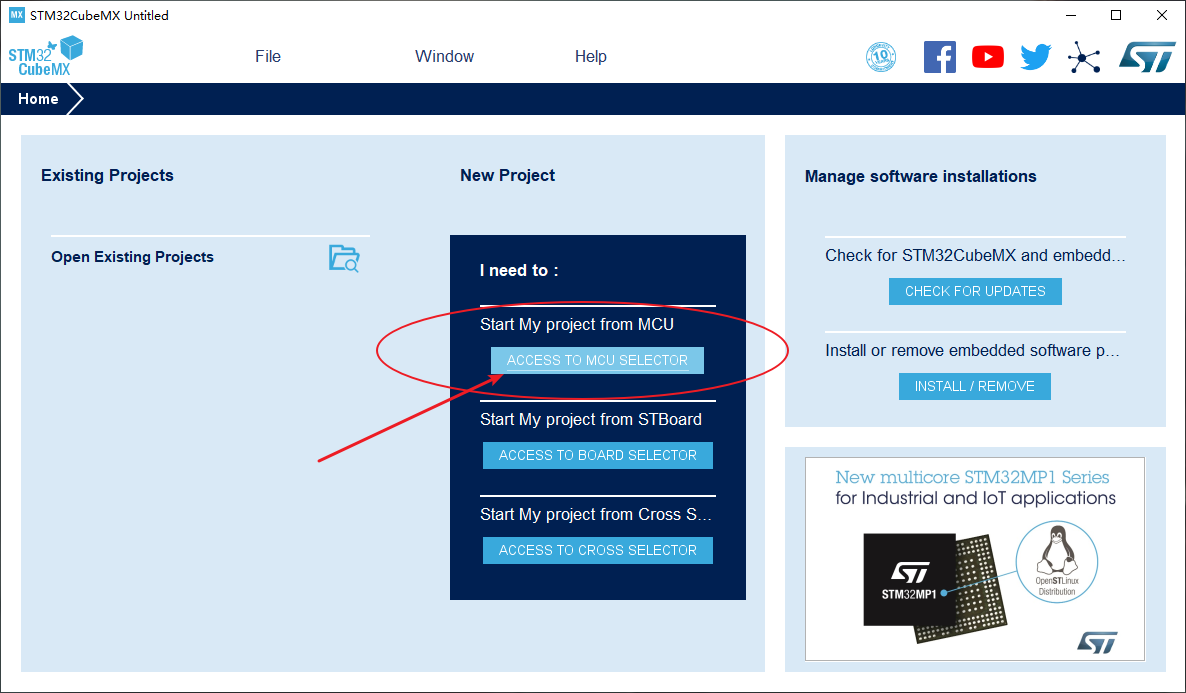
打开STM32CubeMX,打开MCU选择器:
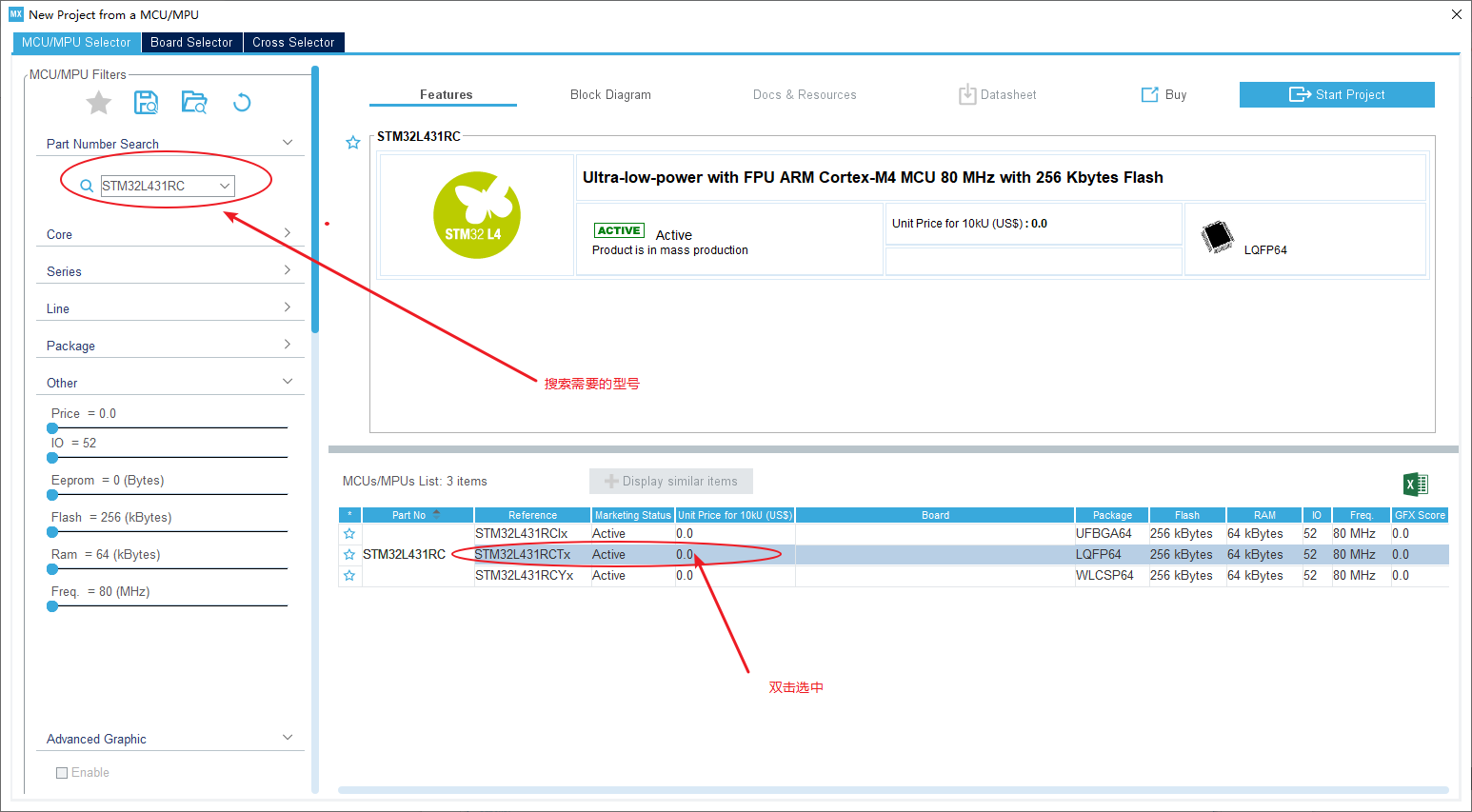
搜索并选中芯片STM32L431RCT6:
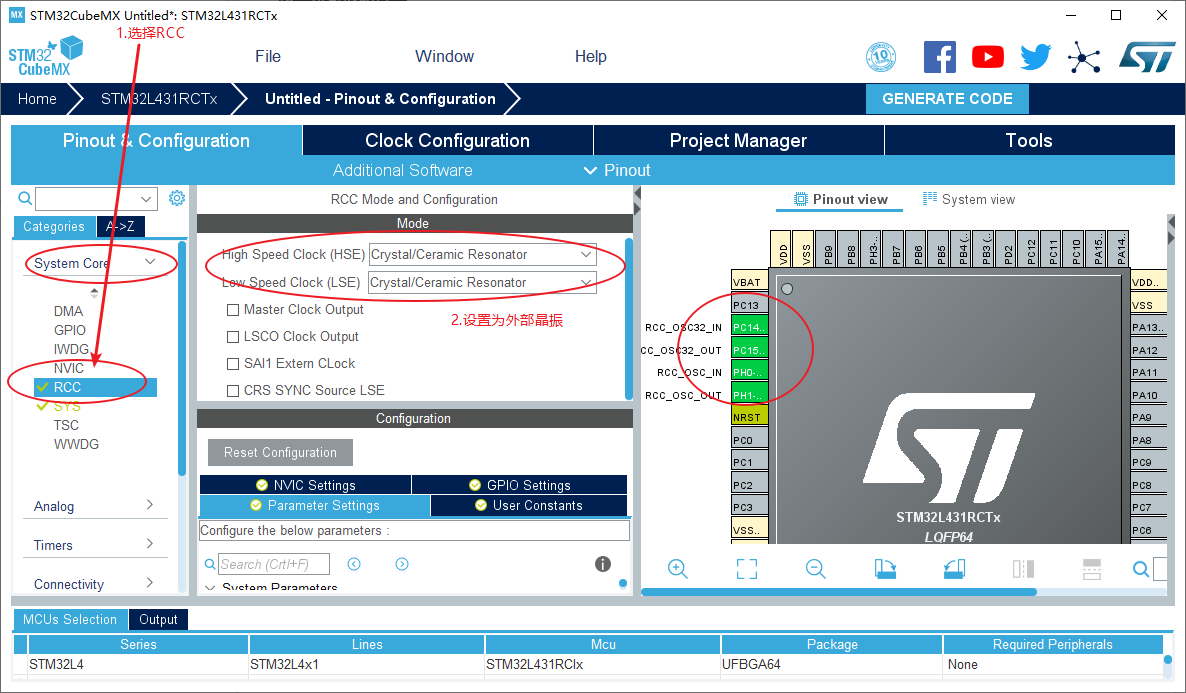
2.配置时钟源
- 如果选择使用外部高速时钟(HSE),则需要在System Core中配置RCC;
- 如果使用默认内部时钟(HSI),这一步可以略过;
这里使用外部时钟为例:
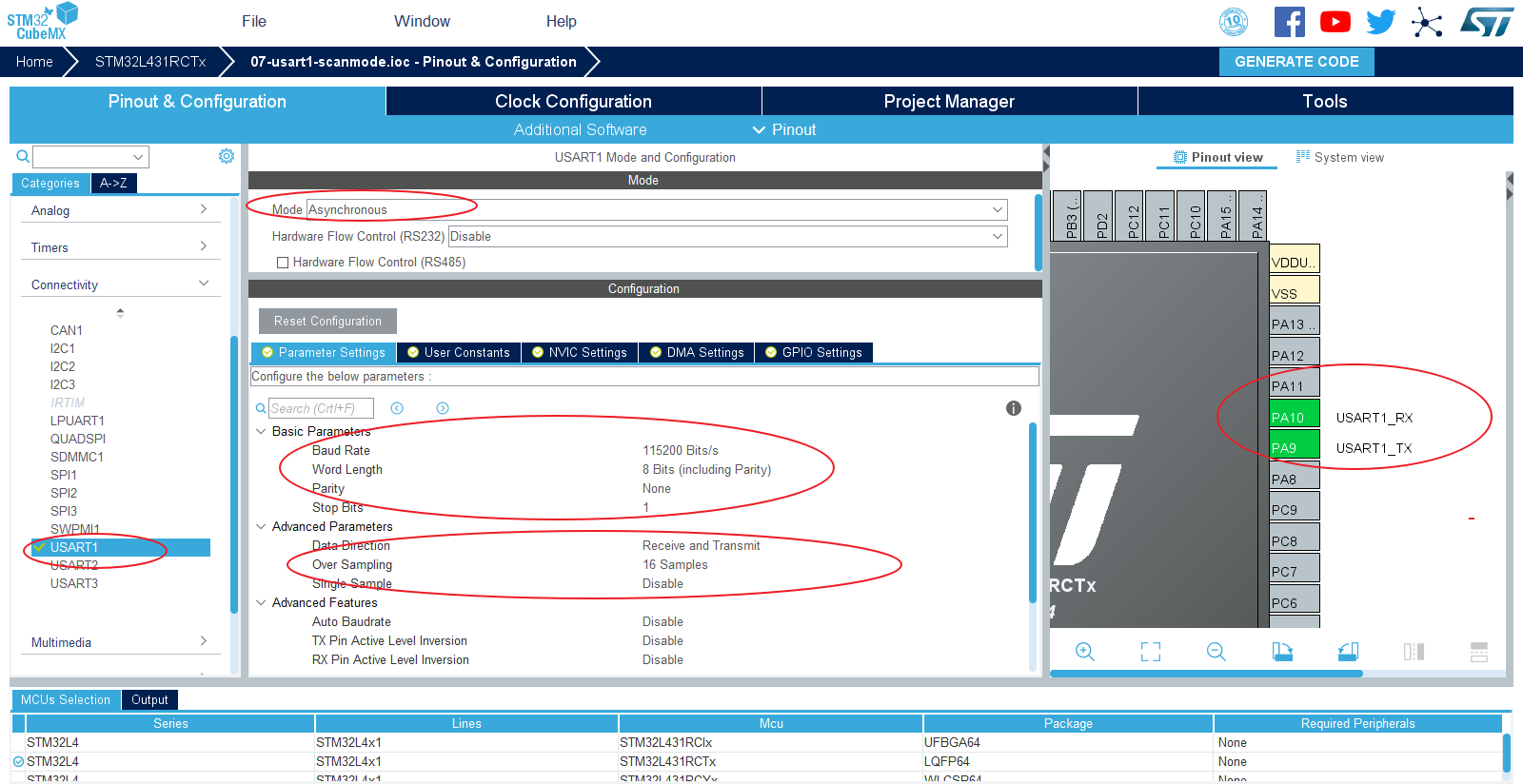
3.配置串口
小熊派开发板板载ST-Link并且虚拟了一个串口,原理图如下:
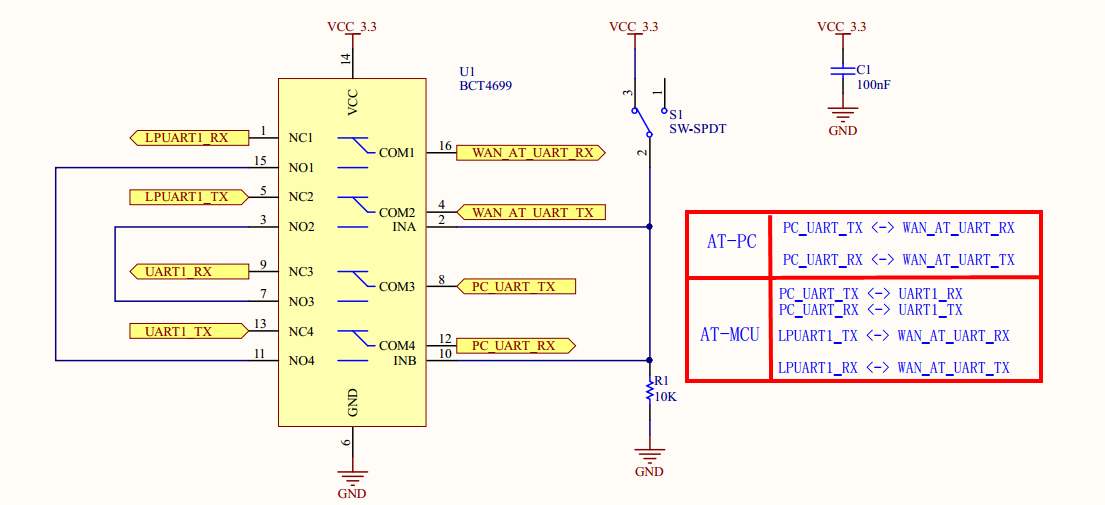
这里我将开关拨到AT-MCU模式,使PC的串口与USART1之间连接。
接下来开始配置USART1:
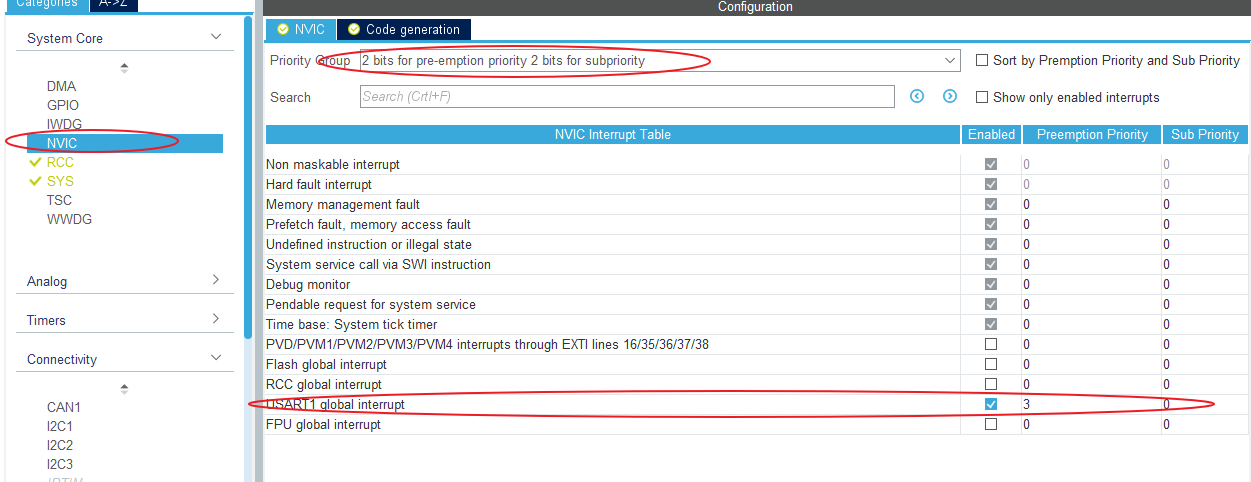
4.NVIC配置
在NVIC中配置USART中断优先级:
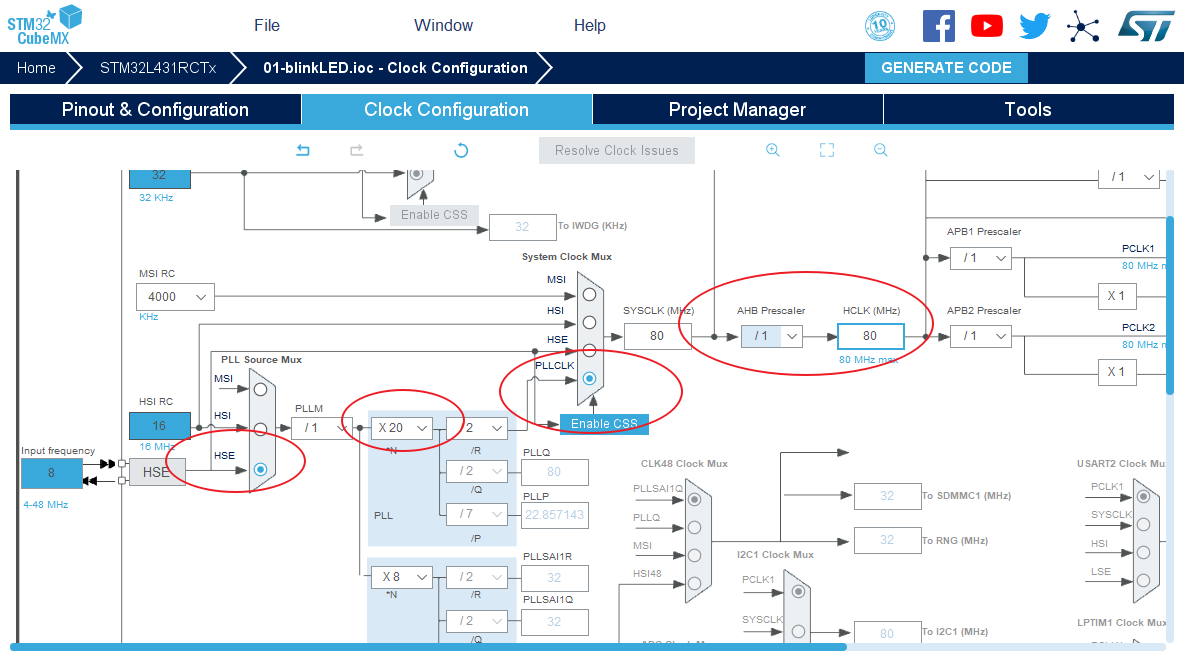
5.配置时钟树
STM32L4的最高主频到80M,所以配置PLL,最后使HCLK = 80Mhz即可:
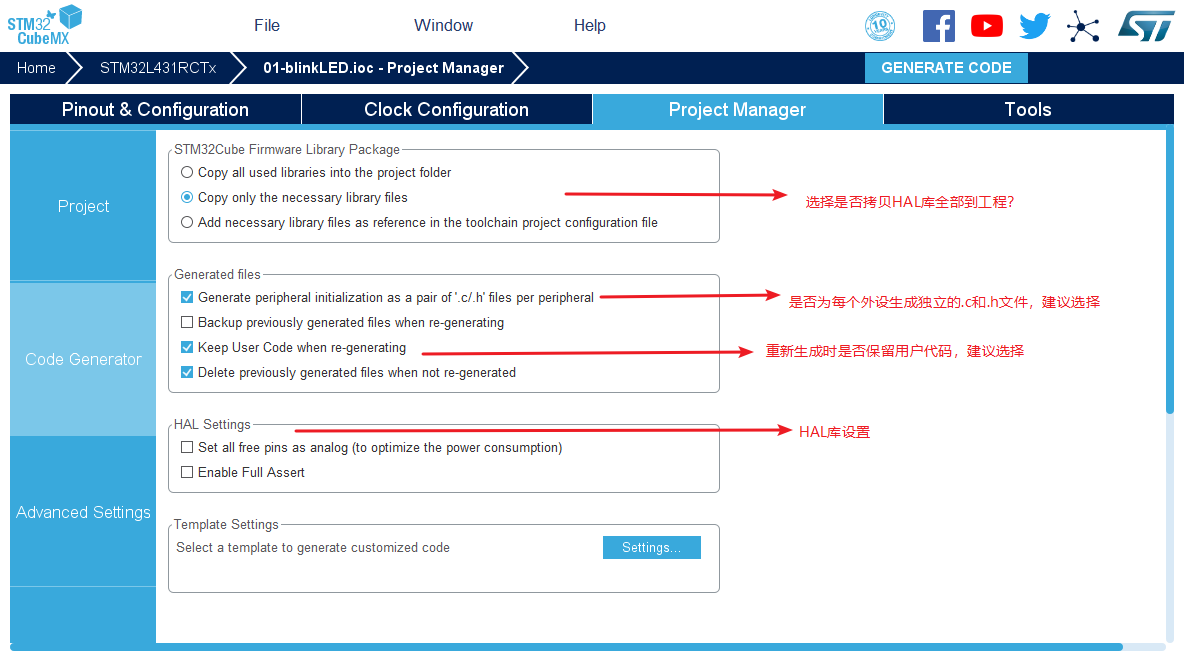
6.生成工程设置
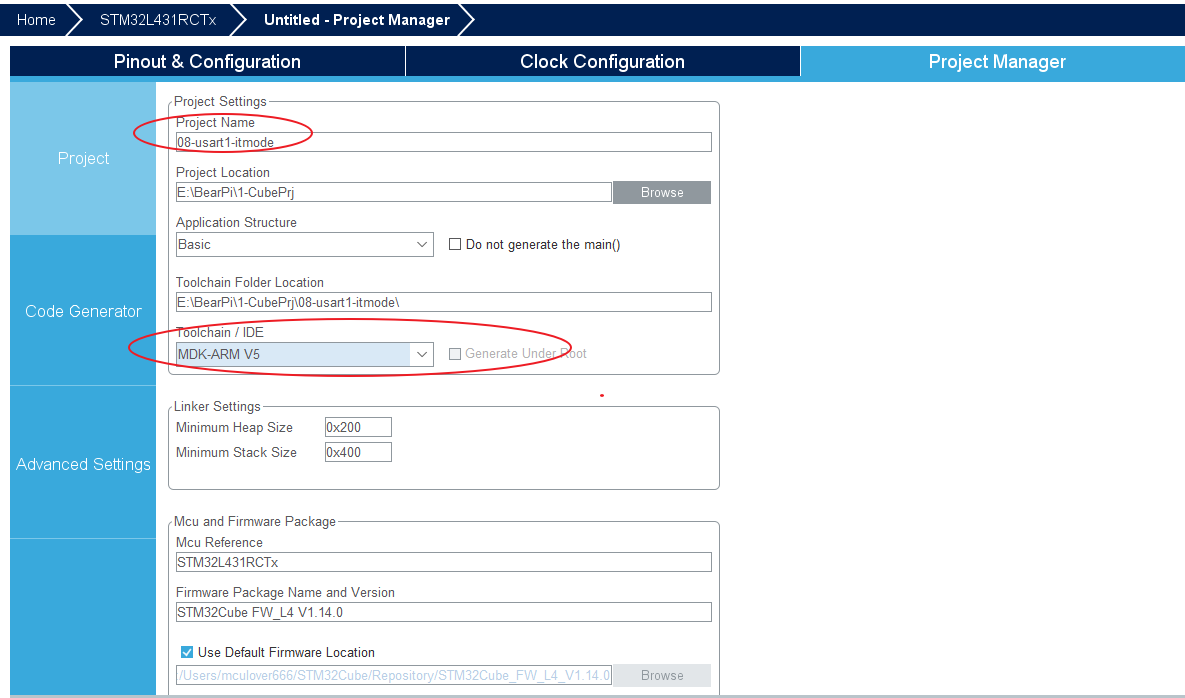
7.代码生成设置
最后设置生成独立的初始化文件:
8.生成代码
点击GENERATE CODE即可生成MDK-V5工程:

三. 编译测试
1.编写用户代码
定义发送和接收缓冲区
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
uint8_t hello[] = "Hello World\n";
uint8_t recv_buf[12] = {0};
/* USER CODE END 0 */
重新实现中断回调函数
在NVIC一讲中我们探索了HAL库的中断处理机制,HAL中弱定义了一个中断回调函数 HAL_UART_RxCpltCallback, 我们需要在用户文件中重新定义该函数,放在哪都可以,这里我放在 main.c 中:
/* USER CODE BEGIN 4 */
/* 中断回调函数 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
/* 判断是哪个串口触发的中断 */
if(huart ->Instance == USART1)
{
//将接收到的数据发送
HAL_UART_Transmit_IT(huart, (uint8_t*)recv_buf, 12);
//重新使能串口接收中断
HAL_UART_Receive_IT(huart, (uint8_t*)recv_buf, 12);
}
}
/* USER CODE END 4 */
修改main函数
在main函数中首先开启串口中断接收,然后发送提示信息:
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
//使能串口中断接收
HAL_UART_Receive_IT(&huart1, (uint8_t*)recv_buf, 12);
//发送提示信息
HAL_UART_Transmit_IT(&huart1, (uint8_t*)hello, sizeof(hello));
/* USER CODE END 2 */
while (1)
{
}
}
2.编译代码
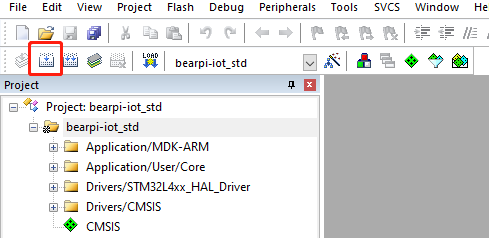
选择project菜单,点击Build Project编译工程。
如果工具栏上有编译按钮快捷键,可以直接点击工具栏上的编译按钮:
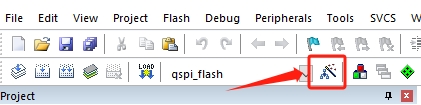
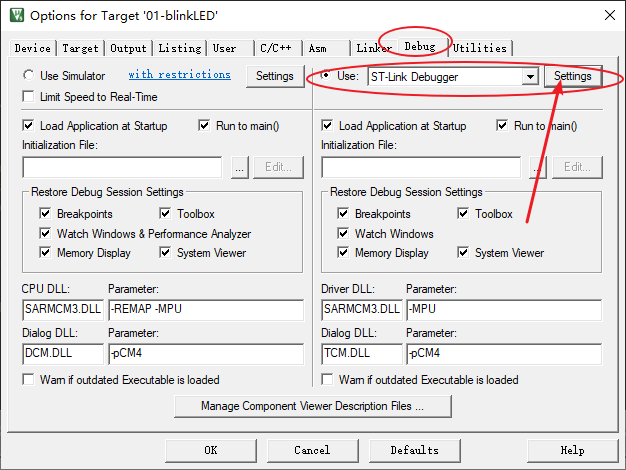
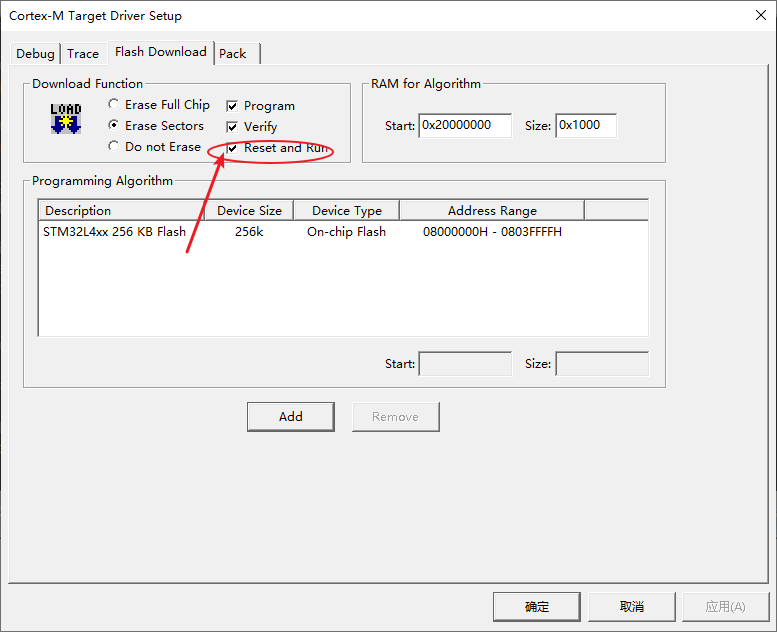
3.设置下载器
4.下载运行
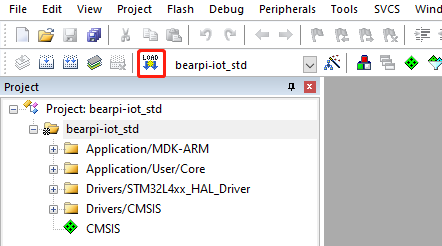
选择Flash菜单,点击Download下载程序到开发板上并运行。
如果工具栏上有下载按钮快捷键,可以直接点击工具栏上的下载按钮:
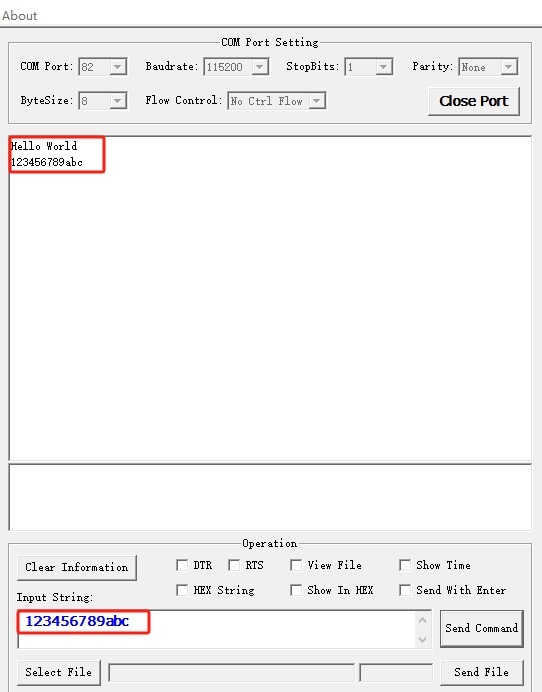
5.实验现象
下载运行后,实验现象如下: 会打印“Hello World”,串口发送12字节的数据后,会接收到同样的数据。
至此,我们已经学会了如何配置USART使用中断模式发送和接收数据。

