
E53_SC2
本示例将演示如何在 BearPi-HM_Nano 2 开发板上使用 E53_SC2 读取三轴加速度。
一、准备工作
参考BearPi-HM_Nano 2 十分钟上手教程完成开发环境搭建、代码获取等工作,以及熟悉代码的编译和烧录流程。
二、硬件设计
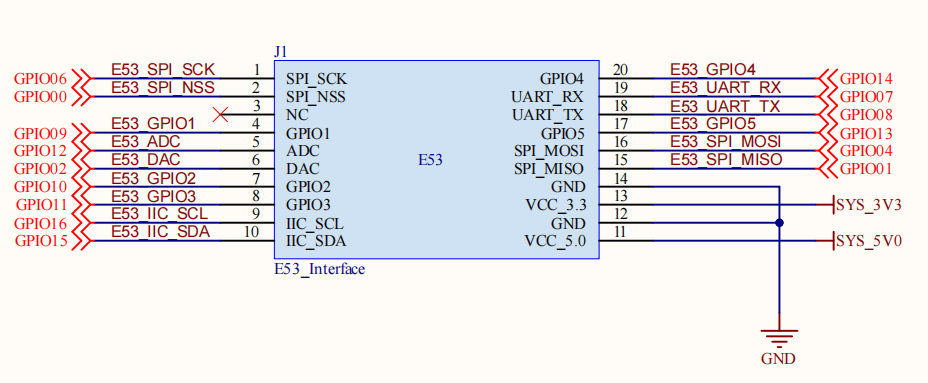
本案例将用到 E53_SC2 智慧井盖扩展板与 BearPi-HM_Nano 2 开发板,其中 E53_SC2 扩展板原理图如下,三轴加速度传感器 MPU6050 是通过 I2C 来驱动。
E53_SC2 智慧井盖扩展板与 BearPi-HM_Nano 2 开发板安装如下图所示

三、软件设计
主要代码分析
打开device\bearpi\bearpi_hm_nano2\app\C4_e53_sc2_axis\e53_sc2_example.c,首先调用 E53_SC2_Init() 函数初始化 E53_SC2 所接的引脚的功能,然后循环调用 E53_SC2_Read_Data() 函数读取三轴加速度并通过串口打印出来,设置第一次读出的三轴加速度为水平状态,当倾斜开发板后会点亮扩展板上倾斜倾斜状态的灯
static void ExampleTask(void)
{
uint8_t ret;
E53SC2Data data;
int X = 0, Y = 0, Z = 0;
ret = E53SC2Init();
if (ret != 0) {
printf("E53_SC2 Init failed!\r\n");
return;
}
while (1) {
printf("=======================================\r\n");
printf("*************E53_SC2_example***********\r\n");
printf("=======================================\r\n");
ret = E53SC2ReadData(&data);
if (ret != 0) {
printf("E53_SC2 Read Data!\r\n");
return;
}
printf("\r\n**************Temperature is %d\r\n", (int)data.Temperature);
printf("\r\n**************Accel[0] is %d\r\n", (int)data.Accel[ACCEL_X_AXIS]);
printf("\r\n**************Accel[1] is %d\r\n", (int)data.Accel[ACCEL_Y_AXIS]);
printf("\r\n**************Accel[2] is %d\r\n", (int)data.Accel[ACCEL_Z_AXIS]);
if (X == 0 && Y == 0 && Z == 0) {
X = (int)data.Accel[ACCEL_X_AXIS];
Y = (int)data.Accel[ACCEL_Y_AXIS];
Z = (int)data.Accel[ACCEL_Z_AXIS];
} else {
if (X + ACCEL_THRESHOLD < data.Accel[ACCEL_X_AXIS] || X - ACCEL_THRESHOLD > data.Accel[ACCEL_X_AXIS]
|| Y + ACCEL_THRESHOLD < data.Accel[ACCEL_Y_AXIS] || Y - ACCEL_THRESHOLD > data.Accel[ACCEL_Y_AXIS]
|| Z + ACCEL_THRESHOLD < data.Accel[ACCEL_Z_AXIS] || Z - ACCEL_THRESHOLD > data.Accel[ACCEL_Z_AXIS]) {
LedD1StatusSet(CTL_OFF);
LedD2StatusSet(CTL_ON);
} else {
LedD1StatusSet(CTL_ON);
LedD2StatusSet(CTL_OFF);
}
}
usleep(TASK_DELAY_1S);
}
}
E53_SC2 API分析
本案例主要使用了以下API完成三轴加速度值的读取。
E53SC2Init()
int E53SC2Init(void);
描述:
初始化E53_SC2。
E53SC2ReadData()
int E53SC2ReadData(E53SC2Data *ReadData);
描述:
读取三轴加速度及温度。
参数:
| 参数名 | 描述 |
|---|---|
| ReadData | ReadData,三轴加速度及温度数据指针。 |
四、编译调试
修改 BUILD.gn 文件
修改device\bearpi\bearpi_hm_nano2\app路径下 BUILD.gn 文件,指定 e53_sc2_example 参与编译。
# "C1_e53_sf1_mq2:e53_sf1_example",
# "C2_e53_ia1_temp_humi_pls:e53_ia1_example",
# "C3_e53_sc1_pls:e53_sc1_example",
"C4_e53_sc2_axis:e53_sc2_example",
# "C5_e53_is1_infrared:e53_is1_example",
# "C6_e53_st1_gps:e53_st1_example",
运行结果
示例代码编译烧录代码后,按下开发板的 RESET 按键,通过串口助手查看日志,会打印温度和三轴加速度信息。当倾斜开发板后会点亮扩展板上倾斜倾斜状态的灯。
=======================================
*************E53_SC2_example***********
=======================================
******************************Temperature is 25
******************************Accel[0] is 45
******************************Accel[1] is 3
******************************Accel[2] is 2089
=======================================
*************E53_SC2_example***********
=======================================
******************************Temperature is 25
******************************Accel[0] is 49
******************************Accel[1] is 5
******************************Accel[2] is 2087

